전석희 경희대 교수 '햅틱 라이브러리 기반 햅틱 텍스쳐 선택 기술' 연구
이 세상 존재하는 표면 모델링…가상공간 속 '촉감' 활용
"사람들 쉽게 쓸 수 있는 기술 개발 목표"
시각정보를 통해 촉감을 예측하는 것처럼 사진 한 장으로 촉감정보를 시뮬레이션해 가상공간에서 촉감을 구현하는 연구자가 있다. 전석희 경희대 컴퓨터공학과 교수다.
"학창시절부터 시뮬레이션 게임에 관심이 많아 자연스럽게 가상공간에 대한 궁금증이 생겼습니다. 가상공간 연구를 하다 보니 햅틱스(haptics, 촉감을 이용하여 컴퓨터로 상호 작용을 제어하는 기술) 기술에도 흥미를 갖게 되어 시작하게 됐네요.(웃음)"
그가 가상공간에 관심을 갖게 된 것은 시뮬레이션 게임의 흥미로부터 시작됐다. 90년대 당시 시뮬레이션은 엉성한 기술이었지만 그에게 많은 자극이 됐다. 이후 전 교수는 포항공대의 가상현실 연구실에서 가상공간 연구 및 햅틱스 연구를 시작했다.
관련 연구를 한 지 10년. 전석희 교수는 많은 햅틱 연구자들로부터 주목을 받는 과학자 중 한명이다. 복잡하고 까다로운 촉각 시뮬레이션에 실제 물체를 결합함으로써 계산을 단순화하는 '햅틱 증강현실' 연구를 통해 공헌을 인정받은 것. 전 교수는 이와 관련된 수 편의 저널 및 학회 논문을 발표, 지난해 한국 햅틱스 연구회로부터 ‘젊은 연구자상’ 수상자로 선정된 바 있다.

전 교수에 따르면 다양한 분야에 적용하고 상용화하려면 빠르고 정확하게 촉감 컨텐츠를 생성해 내고 효율적으로 촉감을 시뮬레이션 하기 위한 '모델링/렌더링 알고리즘 연구'가 더 많이 필요한 상황이다.
리얼 촉감을 위한 다양한 연구개발이 필요한 가운데 전 교수는 실감교류인체감응솔루션연구단과 함께 '햅틱 라이브러리 기반 햅틱 텍스쳐 선택 기술' 연구를 진행 중이다.
전 교수는 "게임, 교육, 쇼핑 등 다양한 분야를 더욱 실감 나게 구현함과 동시에 실제 상용화될 수 있는 기술을 연구개발 할 것"이라고 말했다.
◆ 겉보기와 다른 촉감? 인지 분석 통해 실감나는 햅틱 컨텐츠
"3D스캐너로 옷을 모델링 하면 몇 분 안에 완성됩니다. 그러나 여기에 촉감 기술을 입히려면 옷감, 소매, 단추, 지퍼 등 하나하나 센서로 정보를 입력하고 모델링을 해야 하므로 시간이 오래 걸립니다. 이 시간을 단축하기 위해 ‘햅틱 라이브러리’를 만들었습니다. 사진촬영을 통해 얻은 정보를 바탕으로 촉감을 예측, 가상 조작을 덧입힐 수 있을 것으로 기대됩니다."
전 교수는 이 세상에 존재하는 표면들을 가상공간에서 구현하기 위해 표면정보를 모델링 한 후 '햅틱 라이브러리'에 저장하고 있다. 가상공간에서 구현하고자 하는 제품의 사진을 촬영하면 자동으로 햅틱 라이브러리에서 비슷한 촉감 시뮬레이션이 덧입혀져 물체의 모델링 및 렌더링 등 시뮬레이션이 간단하게 완성되는 기술이다.
사진촬영 뿐만 아니라 펜 타입의 기기를 통해 원하는 제품을 스쳐 지나가듯 긁어주는 것만으로 촉감정보를 얻고 가상공간에서 그대로 시뮬레이션 할 수 있는 기술도 개발 중이다.
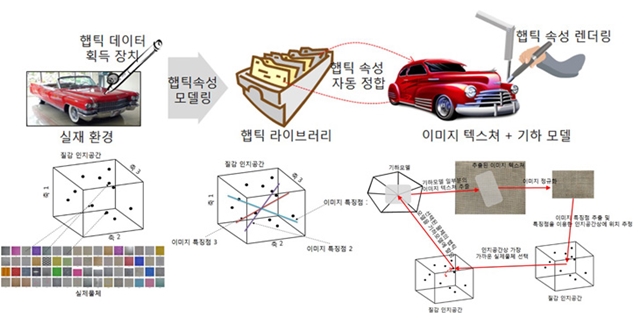
이에 전 교수는 사진 뿐 아니라 햅틱 라이브러리 속 각 모델을 인지적으로 분석해 촉감을 구현할 수 있도록 했다. 보이는 시각 정보를 비롯해 이 모델이 촉감인지적으로 어떤 특징을 가지는지 등을 실험적으로 분석해 인지적으로 가장 비슷한 촉감을 햅틱 라이브러리에서 자동으로 찾도록 했다.
그는 "X축과 Y 축에 울퉁불퉁한 정도와 미끄러운 정도를 각각 놓고 강약을 조절해 가장 유사한 촉감을 유추해 덧입히는 것으로 촉각 시뮬레이션에 실제 물체를 결합할 수 있도록 했다"며 "이를 통해 인지 공간상에서 가장 가까운 촉감을 끌어와 덧입힐 수 있었다"고 설명했다.
그는 '햅틱 라이브러리 기반 햅틱 텍스쳐 선택 기술'이 상용화되면 가상공간에 존재하는 물체에 일일이 디자이너가 촉감을 입히는 작업을 하지 않아도 자동으로 촉감이 입혀질 것으로 기대했다.
슈팅게임을 예로 든 전 교수는 "축구공, 축구장의 잔디 등 가상공간의 이미지만 있으면 우리 알고리즘이 자동으로 촉감을 덧입혀줄 수 있을 것"이라며 " 문화재, 예술작품 등을 가상공간에서 눈이 아닌 촉감으로도 즐길 수 있게 해줄 것"이라고 말했다.
향후 그는 더 실감나는 촉감시뮬레이션을 위해 햅틱 라이브러리의 표면 데이터를 추가 수집하고 역감 등을 실감나게 구현할 수 있는 연구를 추진할 계획이다. 특히 개발한 알고리즘을 실감교류인체감응솔루션연구단에 소속된 디바이스 연구자들과 융합해 공동으로 연구해 보길 희망하고 있다.
그는 "햅틱기술이 실용성이 부족해 아직 많은 연구가 이뤄지지 않았다"면서 "햅틱 라이브러리 기술을 통해 햅틱기술의 실용성을 높이고 싶다“ 고 언급했다. 사람들이 쉽게 촉감 시뮬레이션 기술을 사용하게 하는 것이 목표"라고 말했다.
댓글 정렬