기계연, 사람 촉감 인지 원리 모사···"쌀 한톨의 무게도 감지"
기계·재료·화학·물리·전자 공학 등 융합 연구성과···'사이언티픽 리포트' 게재
한국기계연구원(원장 박천홍)은 나노자연모사연구실(실장 임현의)과 김철기 DGIST 교수 연구팀이 '자기 시냅스가 결합된 원격 촉각 센싱 기술'을 개발했다고 21일 밝혔다.
촉감을 느끼는 접촉 부분과 센서 부분을 공압튜브로 연결해 기존의 전자센서가 작동하기 어려웠던 수중·고온의 환경에서도 활용할 수 있도록 했다.
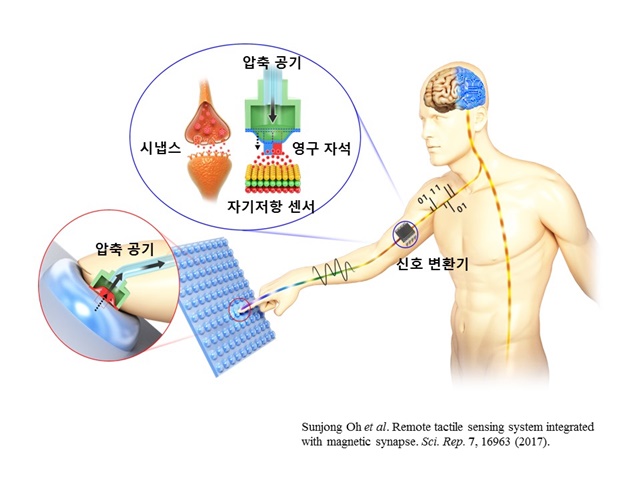
연구팀은 사람의 손끝에서 뇌까지 중추신경계를 따라 촉감 신호가 전달되는 원리를 모사했다. 로봇 손가락 끝에 실리콘으로 된 접촉부를 만들고 센서까지 공압튜브로 연결해서 접촉부에 촉각신호가 입력되면 얇은 공압튜브로 전달된 압력이 센서부의 자석을 움직이고 이 세기의 변화를 자기저항센서가 감지해 전기신호로 출력하는 원리다.
이 기술은 접촉부와 센서부 사이가 물리적으로 떨어져 있는 원격방식이다. 접촉부에서 직접 센싱을 하지 않기 때문에 접촉부에 사용된 유연 소재의 점탄성(점성과 탄성 동시 갖는 성질)과 무관하게 안정적인 측정 결과를 얻을 수 있다.
즉 접촉부에 피부와 유사한 부드러운 소재를 써도 그 성질과 관계없이 정확한 값을 반복적으로 얻을 수 있다는 의미다.
연구팀은 쌀 한 톨의 무게와 같은 0.03g 수준의 압력변화까지 감지하는 실험을 진행, 기존 센서 기술의 한계를 극복했다고 설명했다.
습기와 열기 등 외부 환경 변화에 취약했던 전자센서 부분이 접촉부와 분리돼 수중, 고온의 환경에서도 센서 작동이 가능해졌다.
임현의 나노자연모사연구실장은 "원격 촉각 센싱 기술은 기존의 유연소재를 이용한 촉각센서에서 나타날 수 있는 문제를 해결한 기술"이라며 "바이오닉 암 또는 로봇에 적용하면 원전 사고 현장이나 물 속 등 기존 전자센서가 작동하기 어려운 극한 환경에서도 신뢰도 높은 촉감 정보를 확보할 수 있어 국민의 복지 향상과 안전에 기여할 수 있을 것"이라고 말했다.
이번 연구는 과기부의 '바이오닉암메카트로닉스융합연구사업'의 일환으로 수행했으며, 연구성과는 국제 학술지 '사이언티픽 리포트(Scientific Reports)' 온라인판 지난 5일자에 실렸다.
댓글 정렬