선정윤·김호영 서울대 연구팀, 오염물 구분하는 '거미줄 로봇' 개발
자체 무게 0.2g 대비 68배 무거운 물체 포획 가능
한국연구재단(이사장 노정혜)은 선정윤·김호영 서울대 교수 연구팀이 거미의 행동학적 특성에 착안해 전기적으로 주변의 물체를 감지해 끌어들이고 오염물을 스스로 털어내는 '거미줄 로봇'을 개발했다고 16일 밝혔다.
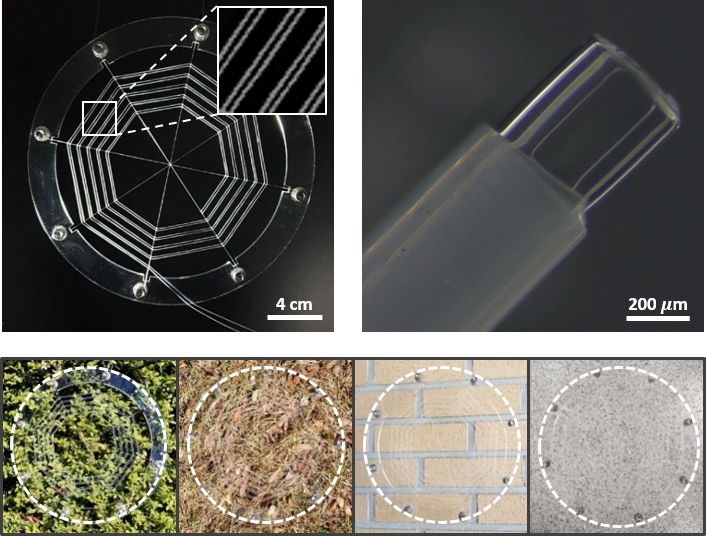
손바닥 크기의 거미줄 로봇은 전극 역할을 하는 오가노젤(organogel)을 절연체 역할인 실리콘 탄성체로 둘러싼 샤프심 두께의 전도성 섬유 소재를 배열해 제작됐다.
거미줄 로봇은 수 센티미터 거리에 강력한 전기장을 만들어 주변 물체를 자극(전기적 분극 유도)해 강한 정전기적 인력으로 물체를 끌어들여 포획한다. 물체 표면에서 나오는 전기장을 감지함으로써 물체와의 상대적 거리를 감지해 실제 접촉하지 않고도 접근을 알아내는 것이다. 충분히 접근했을 시에만 물체를 끌어당김으로, 의도치 않은 물체에 의한 오염은 회피한다.
이러한 기술은 마치 정주성 거미가 최소한의 그물만 만들고 먹이가 거미줄에 걸리면 진동을 감지, 추가적인 거미줄로 먹이의 탈출을 막는 특성에서 영감 받은 것이다.
젤, 탄성체 등 신축성 소재로 제작된 거미줄 로봇은 원래 길이의 3배까지 늘어날 수 있으며 자체 무게 0.2g보다 68배 무거운 물체를 포획할 수 있다. 또한 투명·반투명 소재로 만들어 다양한 환경 속 위장에도 유리하다.
거미줄 로봇은 소프트 로봇을 구성하는 다양한 요소를 상호보완적으로 통합하는 차원에서 의미 있는 성과로 해석된다.
이번 연구 성과는 과학기술정보통신부와 한국연구재단 나노소재기술개발사업, 리더연구지원사업, 선도연구센터지원사업 지원으로 수행됐으며, 이영훈·송원준 연구원이 제1저자로 참여해 로봇공학 분야 학술지 '사이언스 로보틱스 (Science Robotics)' 저널(2019년 JCR Robotics 분야 1위) 표지 논문으로 16일 게재됐다.
댓글 정렬