오용환 KIST 박사 '원격 사용자간 4D+감각기반 물리 협업 기술' 개발
"가상현실 속 터치 욕구 채워줄 것…디바이스 극대화 기대"
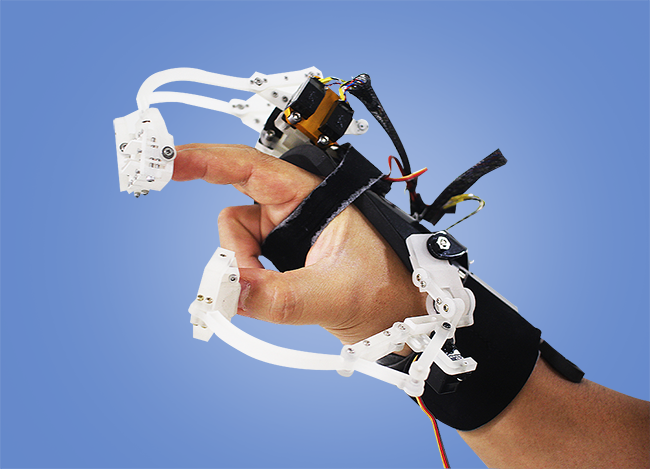
보이지 않는 물체를 어떻게 만졌다는 것일까? 비밀은 오용환 KIST(한국과학기술연구원) 로봇연구단 박사팀이 개발 중인 '4D+ 감각기반 물리협업 기술'에 숨어있다. 오 박사팀은 손과 팔에 장착할 수 있는 웨어러블 디바이스를 개발 중이다. 이 디바이스는 손과 팔에 자극을 줌으로써 가상물체의 역감(力感)과 촉감 등을 느끼게 한다.
최근 군사, 오락, 의료, 학습, 영화, 건축설계, 관광 등 다양한 분야에 활용 가능한 VR(Virtual Reality, 가상현실)제품들이 쏟아져 나오고 있지만 영상을 보고 듣는 수준에 머물러 만지고자 하는 사람의 욕구를 채워주지는 못하고 있다.오용환 박사팀의 감각기반 물리협업 기술이 적용되면 가상현실 속에서 내가 원하는 물체의 역감과 촉감을 그대로 느낄 수 있을 것으로 기대된다.
오 박사는 "가상공간 속에서 사용자가 시각정보를 받아들이면서 물체의 존재감을 역감과 촉감을 통해 느끼는 기술을 개발하는 것이 우리의 목표"라고 말했다.
◆ 생생한 역감 연구 수학적 계산 넘어 생체원리까지 분석
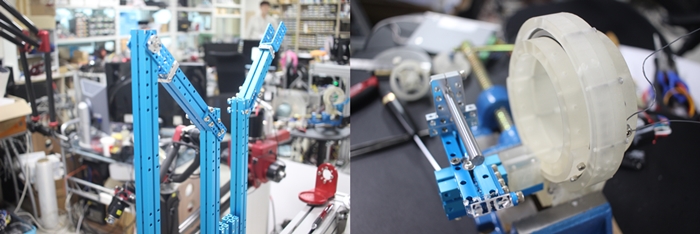
연구실에 들어가니 다양한 조립형 부품들이 가지런하게 정리돼 있다. 그 가운데 알록달록 다양한 크기와 색깔의 구조물들이 눈에 띈다. 손과 팔에 끼워 촉감을 극대화시키기 위해 설계 중인 기계들이다. 오 박사는 "손뿐만 아니라 팔에 자극을 주는 것은 더 실감나는 역감을 제공할 수 있다"고 설명했다.
오 박사는 "무게는 대부분 팔을 통해서 느낄 수 있기 때문에 손과 팔을 모두 제어할 수 있는 디바이스 구현을 해야 한다"면서 "가상의 공간에서 벽을 밀거나 쳤을 때, 혹은 상대방과 물체를 주고받으며 당기는 등의 행위 자체도 실감나게 느낄 수 있는 손·팔 통합형 디바이스 및 제어 기술을 연구개발 중"이라고 말했다.
오 박사팀의 역감 디바이스는 헬스트레이닝 기구로 사용할 수 있을 정도의 힘을 느낄 수 있는 성능을 가졌다. 그러나 그는 더 실감나는 역감을 위해 단순한 수학적 계산을 넘어 생체로부터 활성화되는 근육을 분석하거나, 물체에 힘을 주었을 때 에너지가 손과 팔에 어떻게 배분되는지 알아내는 연구를 함께 추진 중이다.
오 박사팀은 3D 프린터를 이용해 엄지와 검지, 중지 골무를 만들어 손가락을 끼울 수 있는 형태로 제작했다. 골무 끝에는 택타일(tactile, 촉각)센서를 연구 중인 실감교류인체감응솔루션연구단의 또 다른 연구팀 센서를 부착할 계획이다. 이를 통해 촉감과 동시에 손가락으로 밀거나 쥘 때 느껴지는 힘을 느낄 수 있을 것으로 기대된다.
◆ "HD TV→3D→웨어러블로 진화…터치 충족 시켜줄 것"
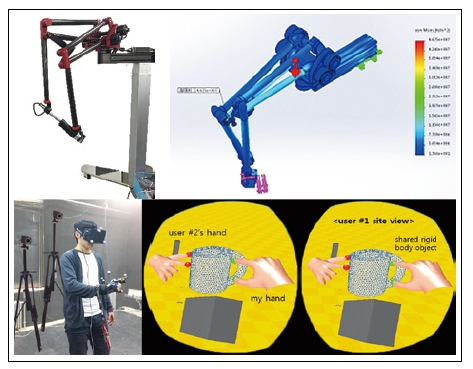
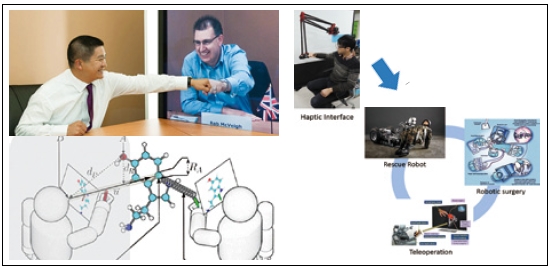
오 박사팀은 한국의 사용자 A와 미국의 사용자 B가 네트워크를 통해 가상공간에서 만나 양팔과 양손을 자유롭게 사용하며 블록을 조립하거나 스마트폰을 주고받고, 손가락 끝을 맞추는 등의 커뮤니케이션을 가능하게 할 기술 구현을 계획하고 있다.
이를 위해 필요한 또 다른 기술이 햅틱 렌더링기술(haptic rendering, 사용자가 가상공간에서 실제 물체와 상호작용하고 있는 것처럼 느끼도록 실현하는 기술)이다. 통신지연에 의해 역감이 1~2초 뒤에 느껴지거나, 역감은 느껴지는데 영상 속도가 늦는 등 가상공간에서의 나의 영상(시각)과 행위(영상)가 맞아떨어지지 않는 것을 보완하기 위한 안정화 기술에 대한 연구가 필수적이다.
오 박사는 "소프트웨어기술이 제대로 받쳐주지 않으면 가상공간에서 손에 쥐고 있던 컵이 날아가거나 영상과 역감이 부자연스럽게 전달되는 오류가 일어난다"며 "시간지연이 있어도 시스템을 안정화시킬 수 있도록 하드웨어와 동시에 물리적 법칙 구현을 통한 소프트웨어기술도 동시 연구개발 중"이라고 말했다.
의대생을 대상으로 수술 실습 콘텐츠를 개발할 수 있으며, 직접 만지고 보기 어려운 공룡이나 멸종 위기종 등의 피부질감을 느껴보는 교육콘텐츠 등 활용가능성이 무궁무진하다. 교육뿐 아니라 나를 대신할 로봇을 우주나 해외로 보내 오감을 전달하는 상상도 해볼 수 있다.
그는 "지금도 다양한 VR 관련제품들이 시장에서 소비자들에게 각광받고 있지만 다음은 만지는 것을 원하게 될 것"이라며 "HD TV에서 3D 디스플레이, 그리고 HMD 등의 웨어러블 디바이스로 발전해 왔다. 다음은 영상정보와 함께 만지는 느낌을 충족시켜줄 기술이 필요할 것"이라고 전망했다.
오 박사팀이 개발한 물체를 주고받는 기술, 역감을 느낄 수 있는 기술 등은 아직 통합단계를 거치지 않았다. 오 박사는 "각각의 요소기술들을 합쳐 우리가 그려온 그림의 완성도를 높이는 것이 우리의 과제"라며 "다양한 분야에 접목되고 활용할 수 있도록 가볍고 저렴한 디바이스를 개발하는데 힘쓸 것"이라고 포부를 밝혔다.
댓글 정렬